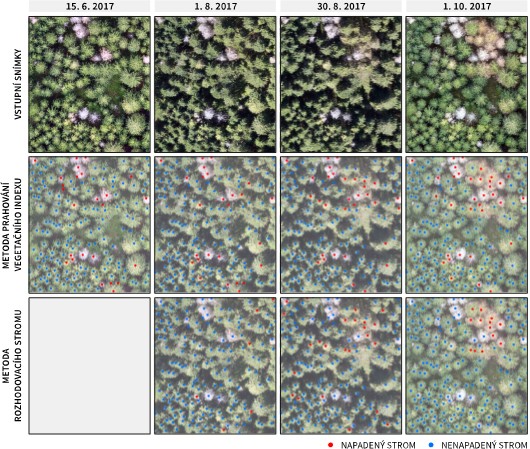
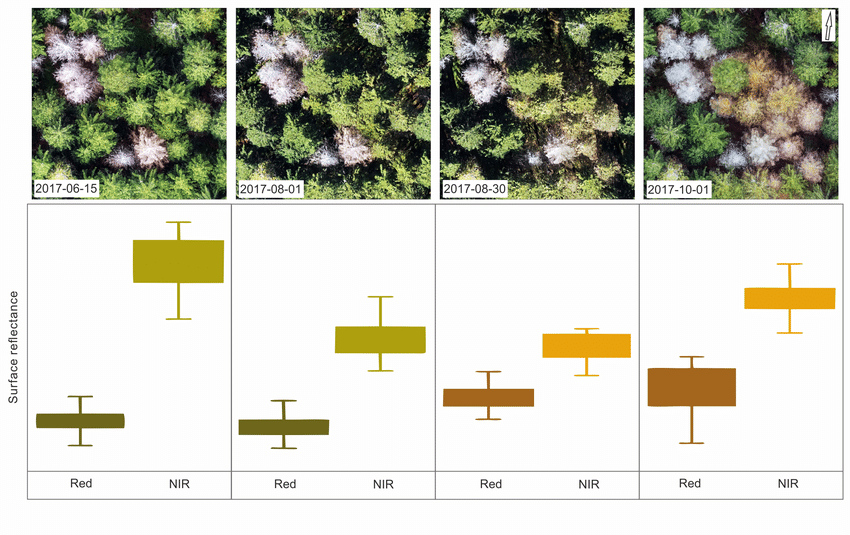
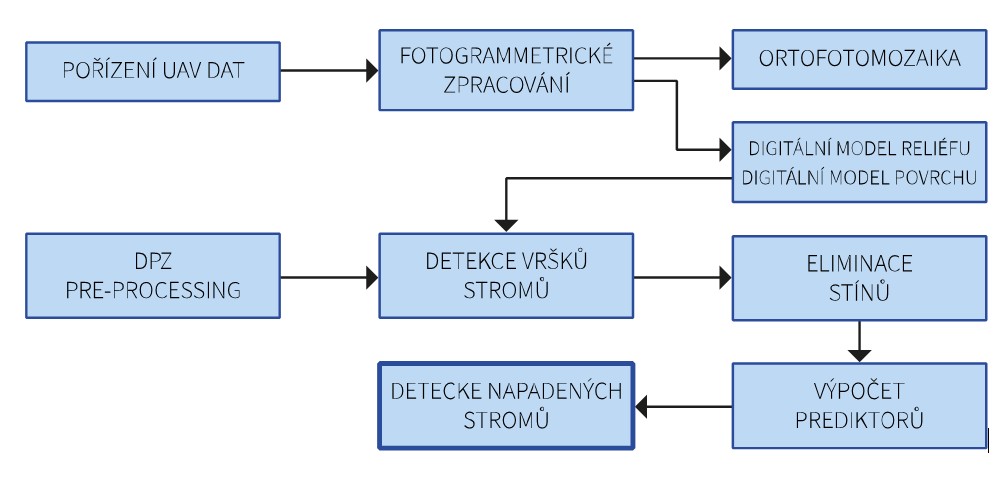
Níže je uvedena konkrétní ukázka aplikace navrženého metodického postup na vybrané zájmové lokalitě, spolu se souhrnným schématem vedoucím k popsaným výsledkům. Zájmová lokalita je tvořena převážně kulturou smrku s ohnisky kůrovcového žíru. Začátek kůrovcové aktivity nastal koncem června a v srpnu již bylo možné detekovat na základě výše popsaných metod a postupů nově napadené stromy. Na zmíněné lokalitě byly provedeny celkem čtyři UAV nálety pomocí RGB (běžný digitální fotoaparát) a modifikované NIR kamery, na kterých byly otestovány všechny v metodice zmíněné detekční přístupy. Pro předzpracování UAV dat a vlastní detekci napadených stromů byl využit software ESRI ArcGIS.
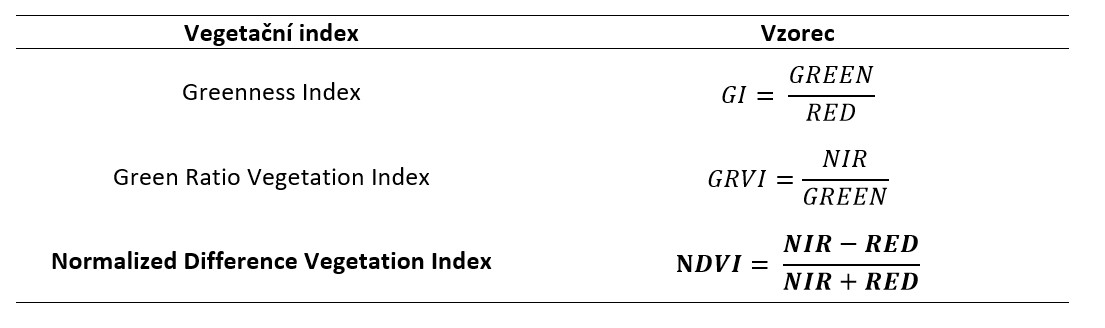
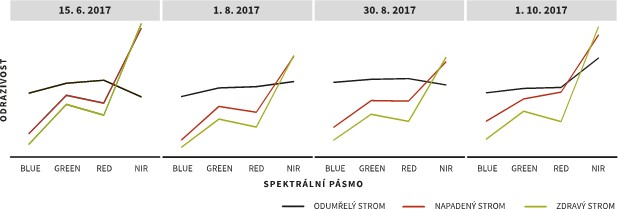
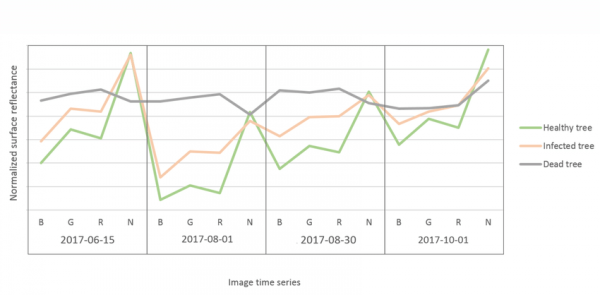
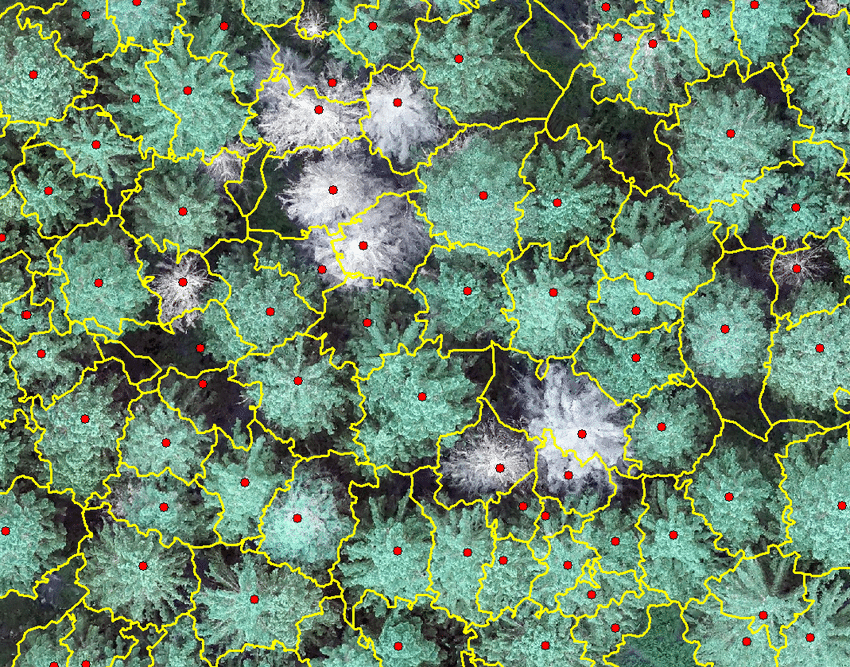
Jednotlivé kroky reflektují výše popsaný metodický postup. Data pořízená bezpilotním leteckým prostředkem byla fotogrammetricky zpracována do podoby ortomozaik, digitálního modelu povrchu a digitálního modelu terénu. Digitální model povrchu byl normalizován digitálním modelem terénu a nízkofrekvenčně zhlazen. Fokální statistikou byly nad normalizovaným digitálním modelem povrchu vymezeny vršky stromů a kolem stromů vyšších než 15 m byla vytvořena 0,5 m obalová zóna (buffer). Ortomozaiky byly sloučeny do vícevrstvého souboru a radiometricky kalibrovány. Pomocí prahování NIR kanálu byly ze sloučené ortomozaiky odmaskovány nežádoucí stíny. Z příslušných spektrálních kanálů byl vypočítán normovaný diferenční vegetační index (NDVI). Následně byly v obalových zónách s využitím zonální statistiky odečteny průměrné hodnoty prediktorů napadení (NDVI pro prahování, spektrální odrazivost R a NIR kanálu pro rozhodovací strom). Vlastní detekce napadených stromů probíhala metodou rozhodovacího stromu nad dvojicí snímků a metodou prahování NDVI jednoho snímku. Jednotlivé metodické kroky jsou schematicky znázorněny v diagramu níže..
Výsledkem předkládané metodiky je databáze lýkožroutem (ne)napadených stromů doplněná o pravděpodobnost správného zařazení do příslušné kategorie a vzdálenost od ohniska nákazy. V případě přístupu založeném na prahování jsou v rámci kategorie napadených stromů detekovány i mrtvé stromy. U rozhodovacího stromu je vytvořený algoritmus citlivý pouze na nově napadané jedince, nicméně v případě potřeby je možné jednoduše přidat další rozhodovací větve a rozlišovat tak i mrtvé stromy napadené v předešlých generacích. Z obrázku je dále patrné, že počet napadených stromů detekovaných jednotlivými přístupy roste s probíhající sezónou (první snímek pořízený 15. 6. zachycuje zájmové území v době těsně před aktivitou, snímky pořízené 1. a 30. 8. v době aktivity a snímek pořízený 1. 10. po aktivitě lýkožrouta).